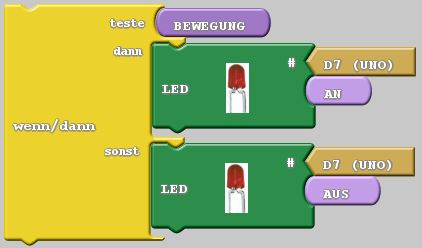
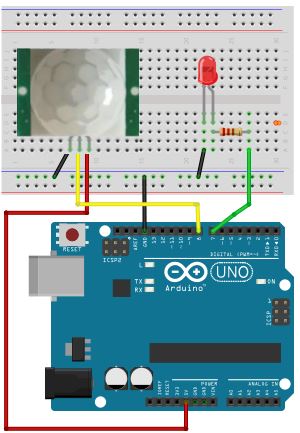
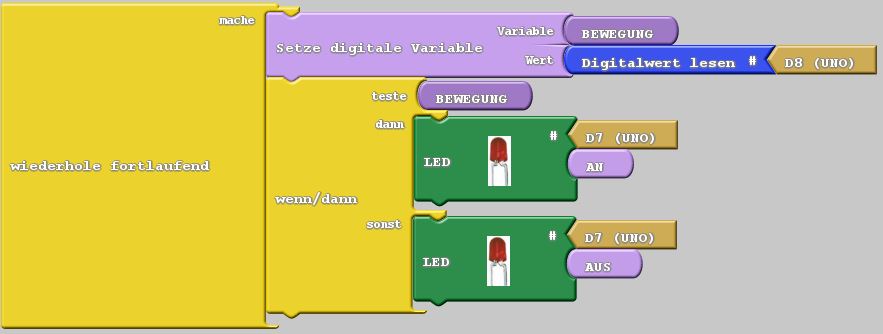
Wird eine Bewegung detektiert, dann legt der Sensor eine Spannung von 5V (HIGH) an seinen Ausgangspin, die vom Arduino an Pin 8 erkannt wird.
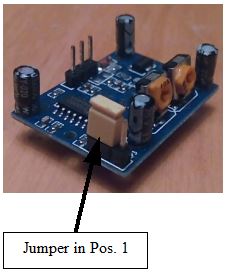
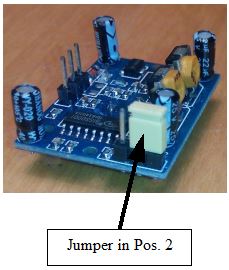
An der Unterseite gibt es auch noch einen sogenannten „Jumper“. Das ist ein Stecker, mit dem dauerhaft zwei verschiedene Positionen gesteckt bzw. geschaltet werden können:
- In Position 1 bleibt das Ausgangssignal so lange erhalten, wie eine Bewegung detektiert wird.
- In Position 2 bleibt das Ausgangssignal eine Zeit lang erhalten, wird abgeschaltet, egal ob es noch Bewegungen gibt oder nicht. Erst kurze Zeit später ist der Sensor wieder einsatzbereit.
Es wird Modus 1 empfohlen. Der Jumper steckt also auf dem linken und dem mittleren Stift.
An Pin 7 wird die Anode der LED mit einem Vorwiderstand angeschlossen. Die Kathode der LED wird mit GND verbunden.
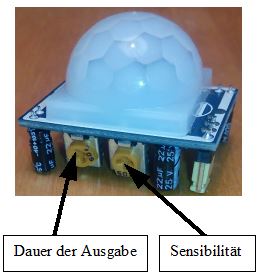
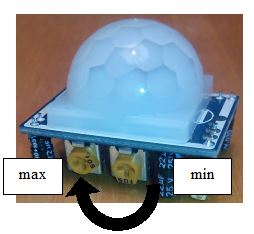
Der Sensor verfügt über zwei Trimmer: Damit kann die Dauer des Ausgangsignals und die Sensibilität, also die Reichweite bzw. das Ansprechverhalten geändert werden.



 oder
oder