Anschluss an den Arduino
|
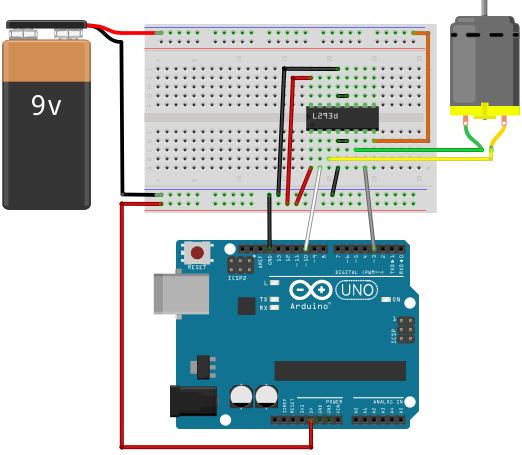
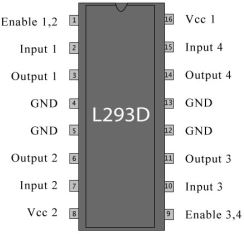
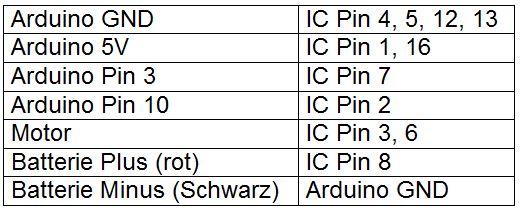
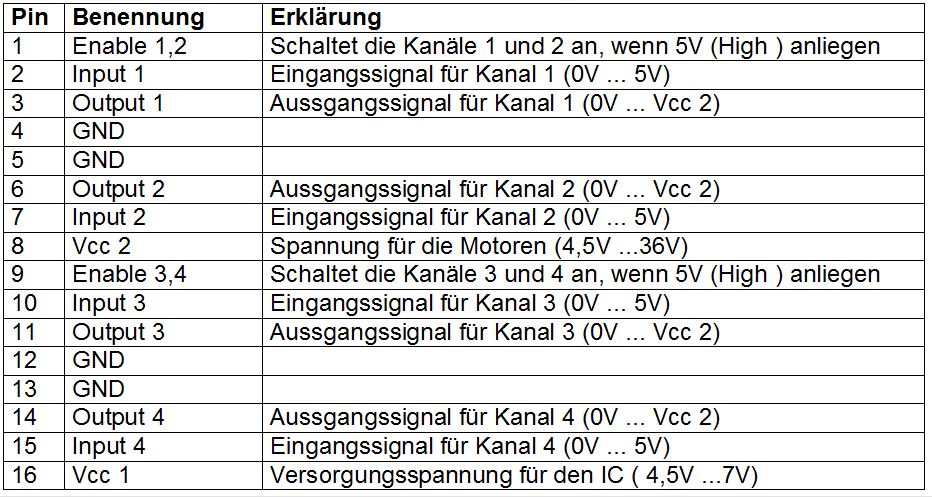
| Die komplette Übersicht der Steckberbindungen:
|
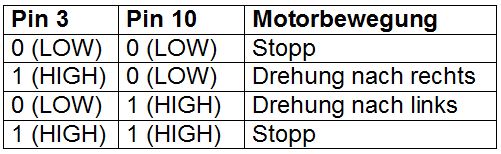
Je nachdem, an welchem Pin welche Spannung anliegt, dreht sich der Motor nun nach rechts, links oder gar nicht:
Das Ardublock-Progrogramm

Bedeutung der einzelnen Blöcke
(Steht unter dem Block keine Erklärung, dann wurde er bereits in einem Tutorial erklärt)
![]()

An Pin 3 wird eine Spannung von 5V (HIGH) angelegt, an Pin 10 wird keine Spannung angelegt, (LOW). Der Motor dreht sich in eine Richtung und zwar 5 Sekunden lang.

An beide Pins wird keine Spannung angelegt (LOW). Es wird 100 Millisekunden gewartet. Der Motor stoppt und kann zur Ruhe kommen.

