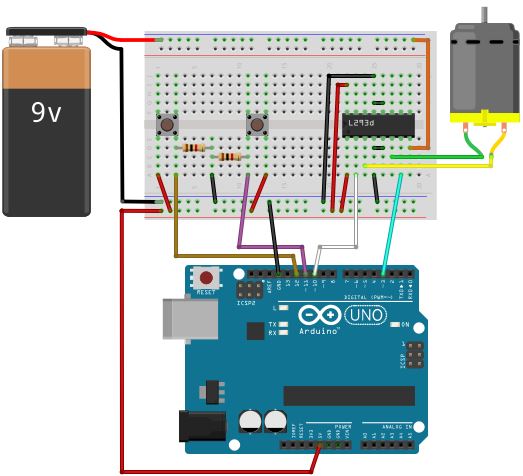
Anschluss an den Arduino
|
Beschreibung
Im Vergleich zur vorherigen Schaltung werden zusätzlich noch die beiden Taster und die beiden Pulldown-Widerstände eingebaut.
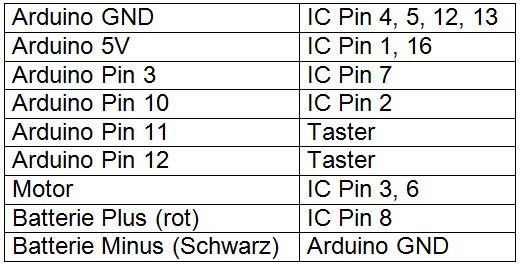
Übersicht der Steckverbindungen:
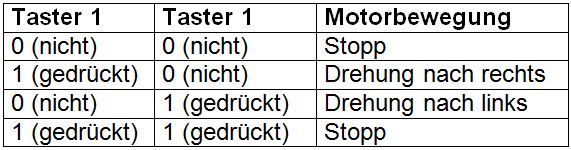
Je nachdem, welcher Taster gedrückt wird, dreht sich der Motor nun nach rechts, links oder gar nicht:
Das Ardublock-Programm
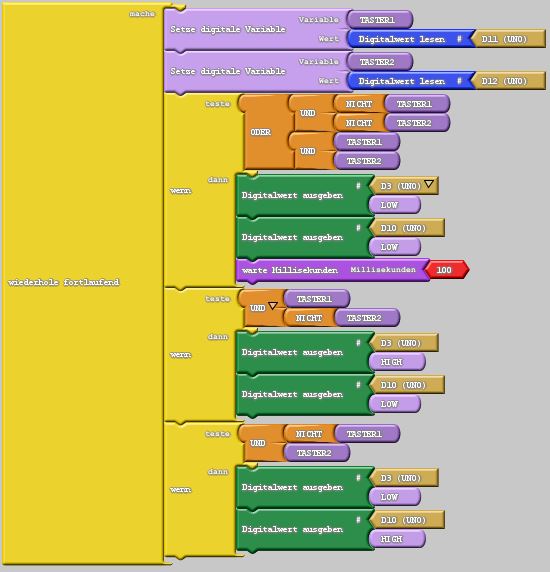
Bedeutung der einzelnen Blöcke
(Steht unter dem Block keine Erklärung, dann wurde er bereits in einem Tutorial erklärt)
![]()

Wenn der Ausdruck in der Zeile „teste“ wahr ist, dann werden die Befehle im „dann“-Teil ausgeführt.







